"I hold every parameter and remember every step the optimizer ever took. The workers? They borrow a few rows, hand me a gradient, and forget everything. We get along."
A Parameter Server Under Mild Staleness
A parameter server splits a training job into one stateful party that owns the model and many stateless parties that own only compute: a worker pulls the parameters it needs, computes a gradient on its batch, and pushes that gradient back, while the server applies the update and keeps the optimizer state. This three-step cycle, pull then compute then push, is the entire programming model, and its decisive feature is that the pull can be sparse: a worker fetches only the embedding rows its batch actually touches, so the bytes on the wire scale with the keys you use, not with the size of the model. That is what lets a single server hold a billion-row embedding table while each worker moves a few kilobytes per step. This section builds the push-pull API from first principles, shows the sparse pull saving in real numbers, and places the pattern where it belongs in the communication taxonomy: it is broadcast-and-gather, not all-reduce.
Section 11.1 argued why a parameter server exists at all: when a model is dominated by a giant sparse table, such as the embedding rows of a recommendation system, replicating the whole model on every worker (the all-reduce assumption of data-parallel training) is wasteful, because any single batch touches only a vanishing fraction of the rows. The remedy is to keep one authoritative copy of the parameters on a server and let workers borrow slices of it. Now we make that concrete. What exactly does a worker send and receive, in what order, and who holds the optimizer state? The answers define the push-pull architecture, and they are simpler than the machinery they replace.
1. The Pull-Compute-Push Cycle Beginner
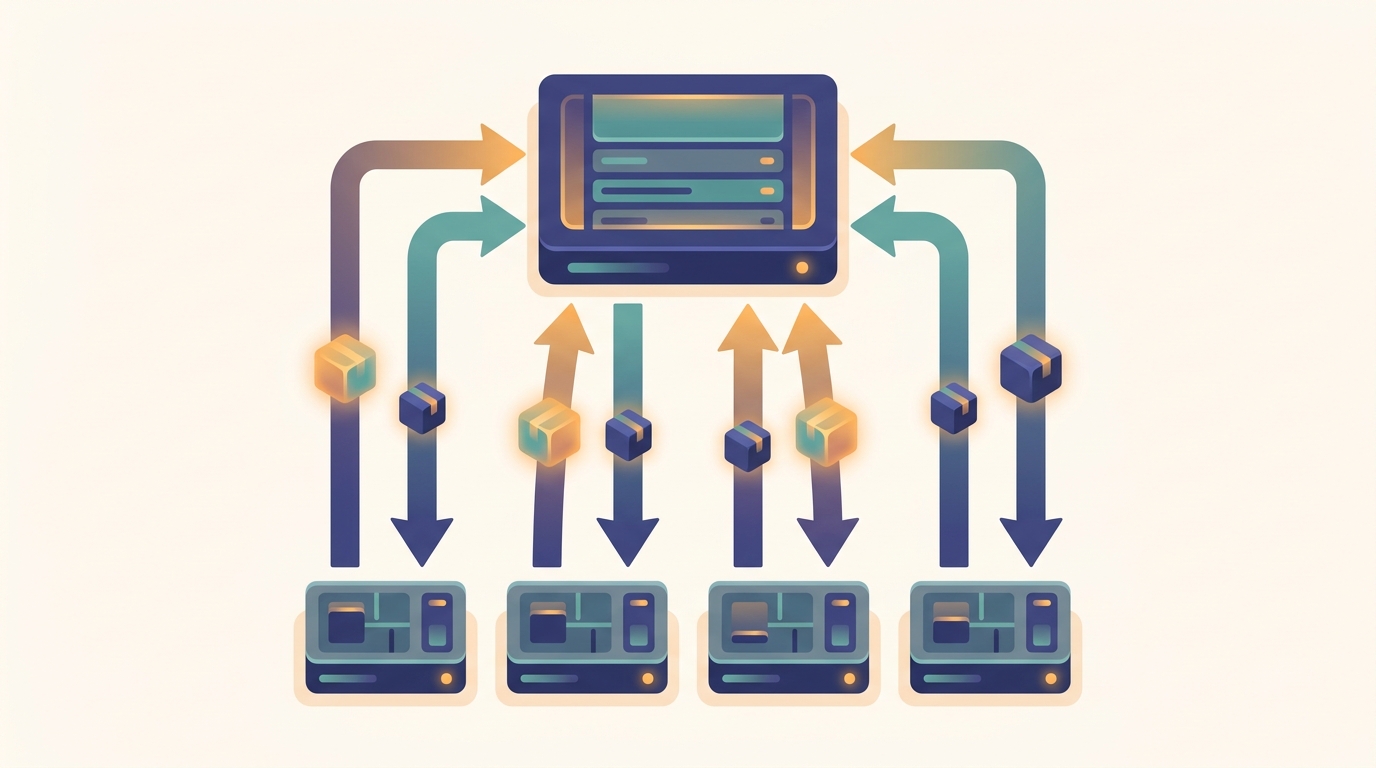
One training iteration on a parameter server is three steps, always in the same order. First the worker pulls: it asks the server for the current value of the parameters it is about to use and receives a copy. Second it computes: using its local batch and the pulled parameters, it runs a forward and backward pass and produces a gradient, a vector the same shape as the parameters it pulled. Third it pushes: it sends that gradient to the server, which applies the update to its authoritative copy. The worker keeps nothing between iterations; on the next step it pulls fresh values again. This is the defining asymmetry of the architecture, and it is worth stating plainly.
The server owns the parameters and the optimizer state (the momentum buffers, the Adagrad or Adam accumulators) and is the only party that applies updates. A worker holds parameters only for the duration of one pull-compute-push cycle and then discards them. This split is what makes workers interchangeable and elastic: any worker can take any batch, a crashed worker loses no model state, and you can add or remove workers without reconfiguring the model, because the single source of truth never moved. The price is that every step pays a round trip to the server, which is exactly the cost the rest of this chapter learns to control.
Contrast this with the data-parallel all-reduce of Chapter 1, where every worker holds a full copy of the model and its own optimizer state, and the workers average their gradients among themselves with no central party. There, the model state is replicated and symmetric; here, it is centralized and the workers are bare compute. The parameter server trades the symmetry of all-reduce for the ability to hold a model far larger than any one worker could, fetched a slice at a time. Figure 11.2.1 shows the cycle and the slice.
2. Range Pulls and Keyed Sparse Pulls Beginner
How much does a worker pull? The naive answer, the whole model, is exactly what we are trying to avoid. The parameter-server API instead lets the worker name what it wants, and two naming schemes cover almost every case. A range pull asks for a contiguous block of parameters, say rows $[1000, 2000)$; it suits dense layers and any parameter laid out as one contiguous array, and it is cheap to express because a range is two integers. A keyed sparse pull asks for an explicit list of keys, say rows $\{7, 42, 88, \dots\}$; it suits embedding tables, where a batch references a scattered, data-dependent handful of rows out of millions or billions. The keyed pull is the workhorse of this chapter, because the sparse embedding table is precisely the model that motivated parameter servers in Section 11.1.
The arithmetic is the whole point. Suppose the table has $V$ rows of width $D$, so the full model is $V \cdot D$ numbers. A batch of $B$ examples, each referencing a few features, touches at most some number $m$ of distinct keys, and typically $m \ll V$. A keyed pull moves $m \cdot D$ numbers down and the matching gradient moves $m \cdot D$ numbers back up, for a round-trip cost of $2 m D$. The ratio of a dense pull to a sparse round trip is therefore roughly $V / (2m)$, which for a million-row table touched by a few hundred keys is a saving of nearly three orders of magnitude. We do not have to take that on faith.
A keyed sparse pull is a library where the server is the only branch that owns books and the workers are readers with no shelves of their own. You do not photocopy the entire stacks before reading; you request the three titles on your list, read them, scribble your margin notes (the gradient), and hand the notes back for the librarian to file. The next reader who wants those same three books gets the updated copies. Nobody ever carries the whole library home, which is the only reason the library can afford a million books.
3. Building the Push-Pull API from Scratch Intermediate
The cleanest way to see the architecture is to implement it. The code below is a complete, in-process parameter server in pure Python: a server that owns a keyed table and an Adagrad accumulator, a pull that returns only the requested rows, a push that applies the update server-side, and a stateless worker that strings the three steps together. We then run eight workers, each with a batch that touches a few dozen random keys out of a million-row table, and we count the numbers that actually crossed the wire against the cost of pulling the whole table once.
import random
random.seed(0)
VOCAB, DIM, LR = 1_000_000, 16, 0.05 # table rows, row width, learning rate
class ParameterServer:
"""Owns the table AND the optimizer state; the only party that applies updates."""
def __init__(self, dim):
self.table, self.accum, self.dim = {}, {}, dim
self.pull_numbers = self.push_numbers = 0 # bytes-on-wire counters
def _row(self, key): # lazy init: rows exist on first touch
if key not in self.table:
self.table[key] = [0.01 * (i + 1) for i in range(self.dim)]
self.accum[key] = [1e-8] * self.dim
return self.table[key]
def pull(self, keys): # keyed sparse pull: ONLY these rows
rows = {k: list(self._row(k)) for k in keys}
self.pull_numbers += len(keys) * self.dim
return rows
def push(self, grads): # server-side Adagrad update
for k, g in grads.items():
acc, row = self.accum[k], self.table[k]
for i in range(self.dim):
acc[i] += g[i] * g[i]
row[i] -= LR * g[i] / (acc[i] ** 0.5)
self.push_numbers += len(grads) * self.dim
def worker_step(server, batch_keys): # stateless: pull, compute, push, forget
rows = server.pull(batch_keys) # 1. pull touched rows
grads = {k: [v * 0.1 for v in vec] for k, vec in rows.items()} # 2. toy gradient
server.push(grads) # 3. push gradient back
ps = ParameterServer(DIM)
batches = [[random.randrange(VOCAB) for _ in range(64)] for _ in range(8)] # 8 workers
touched = set()
for b in batches:
worker_step(ps, b)
touched.update(b)
dense = VOCAB * DIM # cost of pulling the whole table once
sparse = ps.pull_numbers + ps.push_numbers
print(f"table rows (vocab) : {VOCAB:,}")
print(f"dense pull of full table : {dense:,} numbers")
print(f"distinct keys touched : {len(touched):,}")
print(f"pull volume (8 workers) : {ps.pull_numbers:,} numbers")
print(f"push volume (8 workers) : {ps.push_numbers:,} numbers")
print(f"sparse round-trip total : {sparse:,} numbers")
print(f"reduction vs dense pull : {dense / sparse:,.0f}x")
print(f"rows materialized on server: {len(ps.table):,}")
pull ships only requested rows and push applies the update centrally, while the worker is a three-line stateless function. The counters tally exactly how many numbers crossed the wire.table rows (vocab) : 1,000,000
dense pull of full table : 16,000,000 numbers
distinct keys touched : 511
pull volume (8 workers) : 8,192 numbers
push volume (8 workers) : 8,192 numbers
sparse round-trip total : 16,384 numbers
reduction vs dense pull : 977x
rows materialized on server: 511Two details in Code 11.2.1 carry the architecture. The server initializes rows lazily, so a billion-row table costs nothing until a key is actually referenced; only the 511 touched rows were ever materialized. And the optimizer state, the Adagrad accumulator accum, lives entirely on the server and is updated inside push; the worker never sees it, which is what keeps the worker stateless and replaceable. The communication saving is not a trick of this toy: it is the structural reason a parameter server can host a model that no single worker could hold.
The hand-rolled pull, push, and row bookkeeping in Code 11.2.1, roughly forty lines, collapse to a table-config and a lookup in a production system. PyTorch's torchrec represents a batch's referenced keys as a KeyedJaggedTensor and an EmbeddingBagCollection performs the sparse gather, the sharded pull across servers, and the fused optimizer update for you:
import torch
from torchrec import EmbeddingBagConfig, EmbeddingBagCollection, KeyedJaggedTensor
ebc = EmbeddingBagCollection(tables=[
EmbeddingBagConfig(name="item", embedding_dim=16,
num_embeddings=1_000_000, feature_names=["item"])],
device=torch.device("cpu"))
# A batch that references only a handful of keys out of a million rows.
batch = KeyedJaggedTensor.from_lengths_sync(
keys=["item"], values=torch.tensor([7, 42, 88]), lengths=torch.tensor([1, 1, 1]))
pooled = ebc(batch) # sparse pull + lookup; backward() pushes the gradient
torchrec. The library handles the keyed gather, the sharding of the table across servers (the subject of Section 11.3), and a fused sparse optimizer, so the application code names only the table and the keys.4. This Is Broadcast-and-Gather, Not All-Reduce Intermediate
It is worth naming the communication pattern precisely, because the contrast with data-parallel training is the conceptual hinge of this chapter. In all-reduce, every worker contributes a gradient and every worker receives the same averaged result; the operation is symmetric, peer-to-peer, and has no privileged node. The push-pull cycle is not that. A pull is a broadcast from the server outward: the server holds the parameters and sends slices to whichever workers ask. A push is a gather inward: many workers send gradients to the one server that owns the update. The pattern is the broadcast-and-gather pair that Section 4.7 introduced as the movement of weights outward and experience inward, and a parameter server is that pair run on every step.
This is why a parameter server is the natural home for a sparse model and all-reduce is not. All-reduce sums full gradient vectors of identical shape across peers; it has no way to say "I only touched 511 rows, sum just those." The broadcast-and-gather of push-pull is keyed by construction: the worker names its rows on the way out and names them again on the way back, so sparsity is expressed for free. Chapter 10 framed distributed optimization as the general problem of combining gradients computed on partitioned data; the parameter server is the combine-at-a-central-owner answer, in contrast to the combine-among-peers answer of all-reduce that Chapter 6 previewed through the MapReduce shuffle.
This book keeps returning to a single question, how do we recombine work split across machines, and the parameter server gives the second canonical answer. Where data-parallel training combines among peers with all-reduce (Chapter 1), the parameter server combines at a central owner with broadcast-and-gather. The same tension reappears later as the choice between sharded all-gather/reduce-scatter and parameter-server pulls when models grow too large for either approach alone. Whenever you meet a distributed-training method from here on, ask first: does it combine among peers, or at an owner? The answer predicts its communication pattern, its failure modes, and its scaling limits.
5. Cutting Round Trips: Batching and Compression Intermediate
Every pull-compute-push cycle pays at least one network round trip, and on a real cluster the latency of that round trip, not the bytes, is often what limits throughput. Two standard moves attack it. The first is message batching: instead of one pull request per feature, a worker coalesces all the keys its batch touches into a single pull message, and the server returns all the rows in one response; the eight workers in Code 11.2.1 already do this, issuing one keyed pull each rather than 64 separate ones. The second is compression: the rows and gradients on the wire can be sent in lower precision (16-bit or 8-bit instead of 32-bit) or, for the gradient push, quantized and sparsified further, since a sparse model's gradients are themselves often near zero in most coordinates. These reduce the bytes per round trip, complementing the keyed pull that already reduced the number of rows.
There is a deduplication win hiding in the batching too. If two examples in the same batch reference key 42, the worker should pull row 42 once, not twice; coalescing keys into a set before the pull (exactly what the touched set models in Code 11.2.1) removes the duplication before it reaches the wire. Across many workers the same row is often hot, referenced by most batches, which is both an opportunity (cache it) and a hazard (a contention hot spot on the server that owns it), a tension Section 11.3 addresses by sharding the table across many servers so that no single row owner becomes the bottleneck.
Who: A machine learning engineer on the ranking team of a large e-commerce platform.
Situation: A click-through model with a 400-million-row item-embedding table trained on a data-parallel cluster, every worker holding a full copy and all-reducing the full gradient each step.
Problem: The embedding table was 25 GB; replicating it on every worker exhausted accelerator memory, and all-reducing its gradient each step saturated the network even though any batch touched only a few thousand rows.
Dilemma: Keep the familiar all-reduce loop and cap the table size (hurting accuracy), or move to a parameter-server push-pull where the table lives on servers and workers pull only the rows a batch references (more moving parts, a new failure surface).
Decision: They moved the embedding table to a sharded parameter server with keyed sparse pulls, keeping the small dense tower on the existing all-reduce path, a hybrid that matched each part of the model to the right combine pattern.
How: They expressed batches as keyed sparse lookups, coalesced and deduplicated keys per batch before each pull, and pushed only the touched-row gradients, with 16-bit row transfers to halve the bytes.
Result: Per-step embedding traffic fell by more than two orders of magnitude (each batch touched roughly 0.001 percent of the table), the table no longer had to fit in worker memory, and training throughput rose because the network was no longer the bottleneck.
Lesson: Match the combine pattern to the model. Dense parameters all-reduce well among peers; a giant sparse table belongs on a parameter server, pulled by key, so the wire carries only what the batch actually used.
6. Consistency When Workers Interleave Advanced
A single worker's pull-compute-push cycle is clean: it pulls the current parameters, computes a gradient on exactly those values, and pushes it back. The subtlety appears the moment a second worker shares the server. Suppose worker A pulls row 42, and before A pushes its gradient, worker B pulls the same row 42, computes, and pushes first. Now A's gradient was computed on a value of row 42 that is already stale, because B's update has landed in between. A's push still applies, but it applies a gradient that does not correspond to the row's current state. The model still moves in a roughly correct direction, yet the clean per-worker identity of pull-compute-push no longer holds across the cluster.
How much this matters, and what to do about it, is the entire subject of the next two sections. One option is to forbid the interleaving: make every worker pull a consistent snapshot and apply updates in a strict order, which is correct but forces workers to wait on each other (synchronous updates). The other is to embrace the interleaving: let workers pull, compute, and push without coordination and accept that gradients are computed on slightly stale parameters (asynchronous updates), trading a little staleness for a lot of throughput. The push-pull API is identical in both regimes; what changes is the consistency the server promises about the values a pull returns. We make that trade precise, and bound the staleness, in Section 11.4.
The push-pull primitive remains the backbone of industrial recommendation training, and recent work pushes its efficiency rather than replacing it. Production embedding stacks in the lineage of Meta's TorchRec and NVIDIA's HugeCTR / Merlin (2024 updates) fuse the keyed pull, the sharded lookup, and a sparse optimizer into one kernel, and add a multi-tier cache (HBM, then host memory, then SSD) so that hot rows are pulled at memory speed while cold rows live cheaply, an idea continued in systems like NVIDIA's Dynamic Embedding and Google's training infrastructure for trillion-parameter sparse models. A parallel line compresses the push itself: gradient quantization and error-feedback schemes shrink the bytes-on-wire of the gather step with negligible accuracy loss, and frequency-aware methods give hot and cold keys different precisions. The common thread is that the pull-compute-push contract is treated as fixed and correct; the engineering goes into making each of its three steps move fewer bytes and tolerate more keys. We return to terabyte-scale tables, where these caches become essential, in Section 11.6.
We now have the API (pull, compute, push), the saving that justifies it (keyed sparse pulls that move bytes proportional to keys touched, as Output 11.2.1 made concrete), and its place in the taxonomy (broadcast-and-gather, not all-reduce). What we have quietly assumed is a single server holding the whole table. That assumption breaks at scale: one server cannot hold a terabyte table or absorb the gather traffic of a thousand workers. Section 11.3 lifts it, sharding the parameters across many servers while keeping the push-pull contract from this section unchanged.
For each parameter block, state whether a range pull or a keyed sparse pull is the right API and why: (a) the weight matrix of a 2,048-by-2,048 dense layer used by every batch; (b) a 50-million-row user-embedding table where a batch references a few thousand users; (c) the per-feature bias vector of length 1,024 read in full every step. Then explain why issuing a keyed pull for case (a), naming all 2,048 rows individually, would waste effort even though it returns the correct values.
Extend Code 11.2.1 so each worker's batch is drawn from a skewed (for example Zipfian) key distribution instead of uniform, so some rows are referenced many times within one batch. Modify worker_step to count two pull volumes: one that naively pulls a row per reference (with duplicates) and one that deduplicates keys into a set before pulling. Report the ratio between them as a function of skew, and explain why deduplication matters more for hot-key workloads, connecting your result to the contention hazard raised in Section 5.
A pull-compute-push cycle pays one network round trip of latency $\alpha$ (say 100 microseconds) plus transfer time $\beta \cdot 2 m D$ for $m$ touched keys of width $D$ at per-number cost $\beta$. Using $D = 16$ and a transfer rate that makes $\beta = 10^{-9}$ seconds per number, find the number of touched keys $m$ at which the transfer time equals the fixed round-trip latency. Below that crossover, which term dominates, and what does that imply about whether batching keys or compressing bytes is the more valuable optimization for a worker whose batches touch only a few hundred keys? Tie your answer to the batching argument of Section 5.